
Как увеличить производительность с помощью автоматизации паллетирования?
С чего начиналась реализация проекта?
На момент запуска проекта перед командой Ready Robot стояла задача построить комплексное видение автоматизации упаковки на всех производственных линиях и далее поэтапная реализация.
Комплексное видение включало:
-
- пять роботизированных комплексов паллетирования,
-
- высокопроизводительный паллетообмотчик,
-
- транспортную систему для паллет,
-
- систему контроля качества укладки продукции на паллет,
-
- оборудование для этикирования паллет,
-
- систему управления с шинной топологией Profibus, Profinet и IO-Link.
Задачи
На первом этапе были выделены следующие задачи:
1. Автоматизировать паллетирование трех самых производительных линий. Общая производительность — 60 коробок в минуту.
2. Автоматизировать транспортную упаковку на текущей и новой производственной линиях. Общая производительность — 86 паллет в час.
3. Автоматизировать контроль качества упаковки для выполнения требований автоматического склада
В процессе реализации проекта были добавлены еще две задачи:
4. Интегрировать новое упаковочное оборудование: термоусадочные машины — в текущую линию,
5. Автоматизировать паллетирование текущим паллетайзером одновременно двух разных типов упаковки: гофроящик и термоусадочная пленка — без переналадки.
Индивидуальный подход к работе над проектом
Поскольку система была крупной, появилось большое количество подсистем, а также явных и неявных требований.
Работа по проекту выстраивалась недельными итерациями с демонстрациями промежуточных результатов и постоянным контактом с рабочей группой клиента.
На этапе проектирования рабочую группу клиента интегрировали на платформу управления проектами, тем самым объединили всю информацию и всех участников в одном месте. Это позволило быстро подстраиваться под изменения, задействовать нужных специалистов и учитывать их эксплуатационный опыт.
Как команда Ready Robot решила поставленные задачи?
Для автоматизации паллетирования и перехода на новый тип упаковки были спроектированы:
-
- транспортная система с автоматической подачей паллет в зону укладки,
-
- магазин прокладочных листов с разделением на зону робота и зону оператора,
-
- захватное устройство с автоматической переналадкой под формат продукции, которое работает одновременно как с гофроящиком, так и термоусадочной пленкой,
-
- формирующие столы с автоматической переналадкой под формат продукции.
Все это позволило обеспечить производительность комплекса в 60 к/мин при загрузке робота 95%.
Для автоматизации транспортной упаковки:
-
- подобрали высокопроизводительный паллетообмотчик кольцевого типа Haloila серии Octopus с автоматической сменой пленки.
-
- объединили две линии с помощью моста с двумя грузовыми подъемниками. Производительность каждого грузового подъемника — 60 паллет в час.
Эти решения позволили упаковывать паллеты без остановки процесса, независимо от возникновения аварий на паллетообмотчиках и замены материалов на них.
Для автоматизации контроля качества упаковки мы разработали два типа измерительных рамок:
-
- Первый тип для ограниченного пространства на базе камер технического зрения и датчиков расстояния.
-
- Второй тип с использованием лидаров.
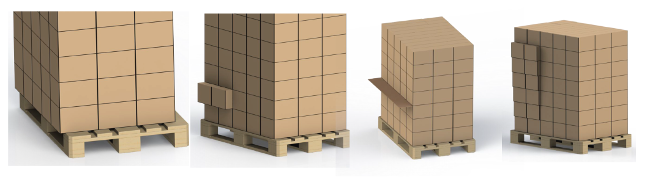
Обе рамки имеют возможность определять смещение прокладочного листа и смещение всего груза на паллете. Рамка на базе лидаров также может видеть наклон груза и выступ отдельных коробов.
Источник информации для новостного портала о роботах Робот — RBT.su
Читайте также:
Рой маленьких роботов поможет художникам рисовать картины — rbt.su
OnRobot представляет новый электромагнитный захват MG10